

用于无人机测绘的RTK GNSS 模块
RTK 和 PPK 中厘米级精度的定位。
使用更少的 GCP 进行精确的无人机测绘
达到M+
单频段
基线长达 20 公里
到达M2
多频段
基线长达 100 公里
厘米级精度的 PPK 测绘。
使用更少的 GCP
为什么相机同步如此重要
通常自动驾驶仪会触发相机并记录当时的坐标。 当无人机以 20 m/s 的速度飞行且 GPS 工作在 5 Hz 时,这意味着您的自动驾驶仪将仅每 4 m 读取一次位置读数,这不适合精确的地理参考。 此外,触发和实际拍摄照片之间总是存在延迟。
到达消除了延迟
Reach通过直接连接相机热靴口解决了定位问题,与快门同步。 每张照片的时间和坐标均以小于一微秒的分辨率记录。 此方法允许 GCP 仅用于检查您的准确性。
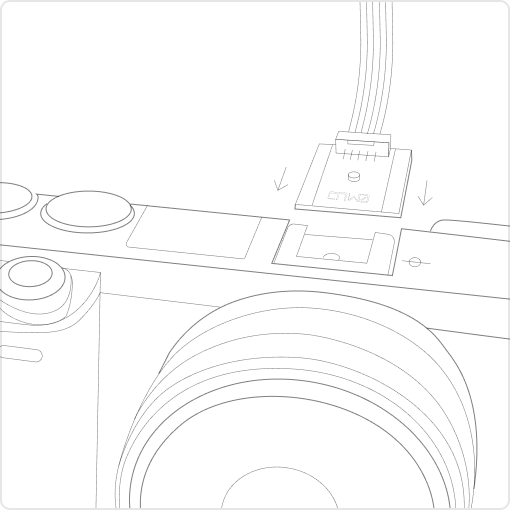
1. 将 Reach 连接到相机上的热靴端口
每次拍摄照片时,相机都会在闪光灯热靴连接器上产生一个脉冲,该脉冲与快门打开同步。
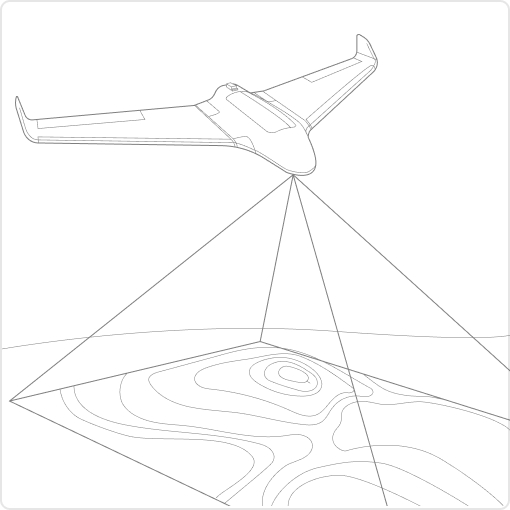
2. 驾驶无人机,Reach将记录照片事件
Reach 以亚微秒分辨率捕获闪光同步脉冲,并将其存储在内部存储器的原始数据 RINEX 日志中。
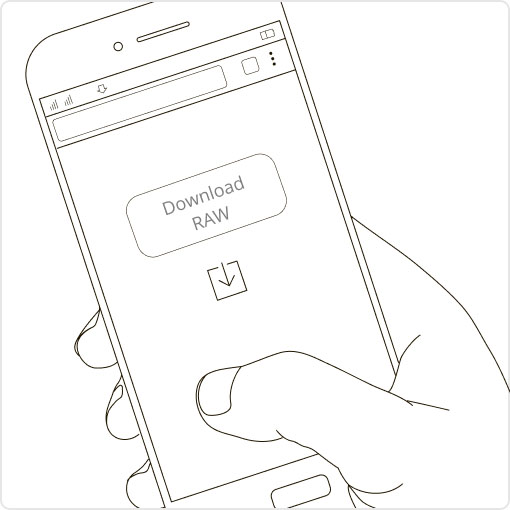
3.从Reach和基站下载日志
飞行结束后,从机载 Reach 模块和基站(Reach RS、CORS 或其他接收器)获取 RINEX 日志。
4. 处理日志并获取带有照片地理标签的文件
使用免费的 RTKLIB 软件处理 RINEX 文件。 生成的具有照片精确坐标的文件可用于地理配准。

NTRIP 或另一个 Reach 作为基站
为了计算 PPK 和 RTK 中的厘米级精确坐标,Reach 需要基站进行修正。 它可以是另一个 Reach 接收器或 NTRIP 服务。 还支持 VRS。
兼容性
Reach M2 和 M+ 通过任何链路与其他 Reach 接收器无缝协作,并与支持 RTCM3 和 NTRIP 的任何其他接收器兼容。
Reach M+ 和 Reach M2之间进行选择
达到 M+
和达到 RS+
如果您的工作基线较短,那么 Reach M+ 是最佳选择。
RTK
长达 10 公里
PPK
长达 20 公里
修复时间
1-2 分钟
频段
单频段
RINEX 记录更新率
高达 14 Hz
达到 M2
和达到 RS2
提供强大的性能和快速初始化,允许在长基线上工作。
RTK
长达 60 公里
PPK
长达 100 公里
修复时间
5 秒
频段
多频段
RINEX 记录更新率
高达 20 Hz
附带
ReachView 3 应用程序
最用户友好的数据收集软件,适用于 Android 和 iOS。 支持数千种坐标系并翻译成多种语言。 借助 ReachView 3,您可以控制 Reach 接收器的所有功能,例如设置基站、记录 RINEX 数据以及配置 NMEA 输出。

相机
控制
Reach 可以触发摄像头并注册事件。 事件标记功能是航空测绘的必备功能,因为它可以记录快门激活的精确时间。

简单的日志管理
日志会自动直接记录到内存中的 RINEX 中。 查看日志列表并使用 ReachView 应用程序下载它们。

监测数据
ReachView 显示当前的卫星水平、您在地图上的位置等等。
规格
立即购买!
在我们安全的在线商店放心购物。 香港免费送货!


