GoSLAM RS-i 系列移动扫描仪为大多数移动扫描应用提供轻便、防风雨且经济实惠的解决方案。该系列共有三种 RS-i 型号。选择在 LiDAR 点密度和范围方面满足您需求的一款。还有多种配件可供选择。滚动了解更多...
GoSLAM RS100i
紧凑、低成本、易于使用的移动 SLAM LiDAR 装置,扫描范围可达 120m。 RS100i 专为承受所有天气而设计,配有无缝移动应用程序界面,可提供实时扫描反馈和监控。可选配 360 度摄像头,实现出色的点云着色。

GoSLAM RS100i-32
该装置在物理上与标准 RS100i 相同,具有更高分辨率的扫描仪,具有 32 条激光线,扫描速率为 640,000 点/秒,数据存储容量增加了一倍 (1TB)。 RS100i-32 还配备了无缝移动应用程序界面,可提供实时扫描反馈和监控。同样,可以安装可选的 360 度摄像头,以实现出色的点云着色。
GoSLAM RS300i-32
RS100i-32 的升级版配备了更长范围的扫描仪,使该装置的有效范围达到 300m。 RS300i-32 还配备了无缝移动应用程序界面,可提供实时扫描反馈和监控。同样,可以安装可选的 360 度摄像头,以实现出色的点云着色。
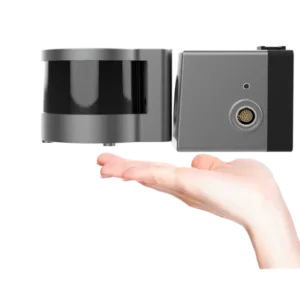
GoSLAM RS-i 特点

GoSLAM 扫描仪结构紧凑、重量轻。 它们的重量仅为 1.3 公斤,并配有完全保护和防风雨密封的旋转扫描仪。

GoSLAM 电源模块支持两节电池,实现不间断电源冗余。 当扫描仪仍在运行和收集数据时,可以热插拔电池。

该装置还支持一系列数据传输方法,包括访问移动硬盘,或通过有线连接或 WiFi 连接 USB。 该系统集成了与第三方系统协作的接口,开辟了更多可能性。
将任何 GoSLAM RS 扫描仪连接到您的移动设备,以获得无缝且直观的控制界面。 控制扫描仪设置,并在现场采集时实时预览扫描结果。

每台扫描仪背面的大型彩色状态显示屏还支持信息和设置以及操作说明,使其更易于使用和入门。

GoSLAM的混合处理功能可以在当前扫描仍在进行的同时对先前的数据集进行后处理! 这样,可以更快、更有效地收集高精度数据。
GoSLAM 配件
GoSLAM 背包套件
轻型背包套件,可用于携带任何 GoSLAM 移动扫描仪。 支持一键快速安装。 可容纳 GoSLAM 扫描仪和双电池电源组。
可选的 GNSS 接收器可以安装在背包框架的顶部。 配合RTK模式下的GNSS接收器,扫描仪能够实现厘米级实时定位。 无需闭环即可获得高精度点云数据。


GoSLAM 车载安装套件
GoSLAM 车载安装套件是一款易于安装的汽车顶部套件,可容纳所有 GoSLAM RS 系列 3D 激光扫描仪。 使用车载支架享受更远距离、高速的数据采集。
与背包套件一样,可选的 GNSS 接收器可以安装到汽车安装框架上。 配合RTK模式下的GNSS接收器,扫描仪能够实现厘米级实时定位。 无需闭环即可获得高精度点云数据。
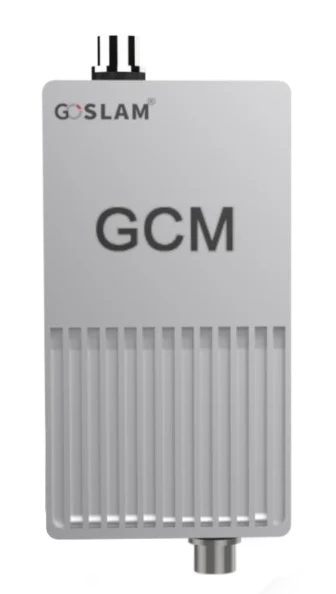
GoSLAM GCM 模块
GCM 模块支持背包和车载平台,并且可以连接到各种 RTK GNSS 接收器(包括 Emlid RS3!) 通过您首选的 NTRIP 服务或从另一个 GNSS 基站扫描时快速获取 RTK 数据。 无需闭环即可获得准确可靠的 3D 数据。
埃姆利德到达RS3
适用于 GoSLAM 扫描仪的理想 GNSS 接收器。 Reach RS3 包括内置倾斜补偿、与 NTRIP 服务的轻松 4G 网络连接以及基于应用程序的直观界面。

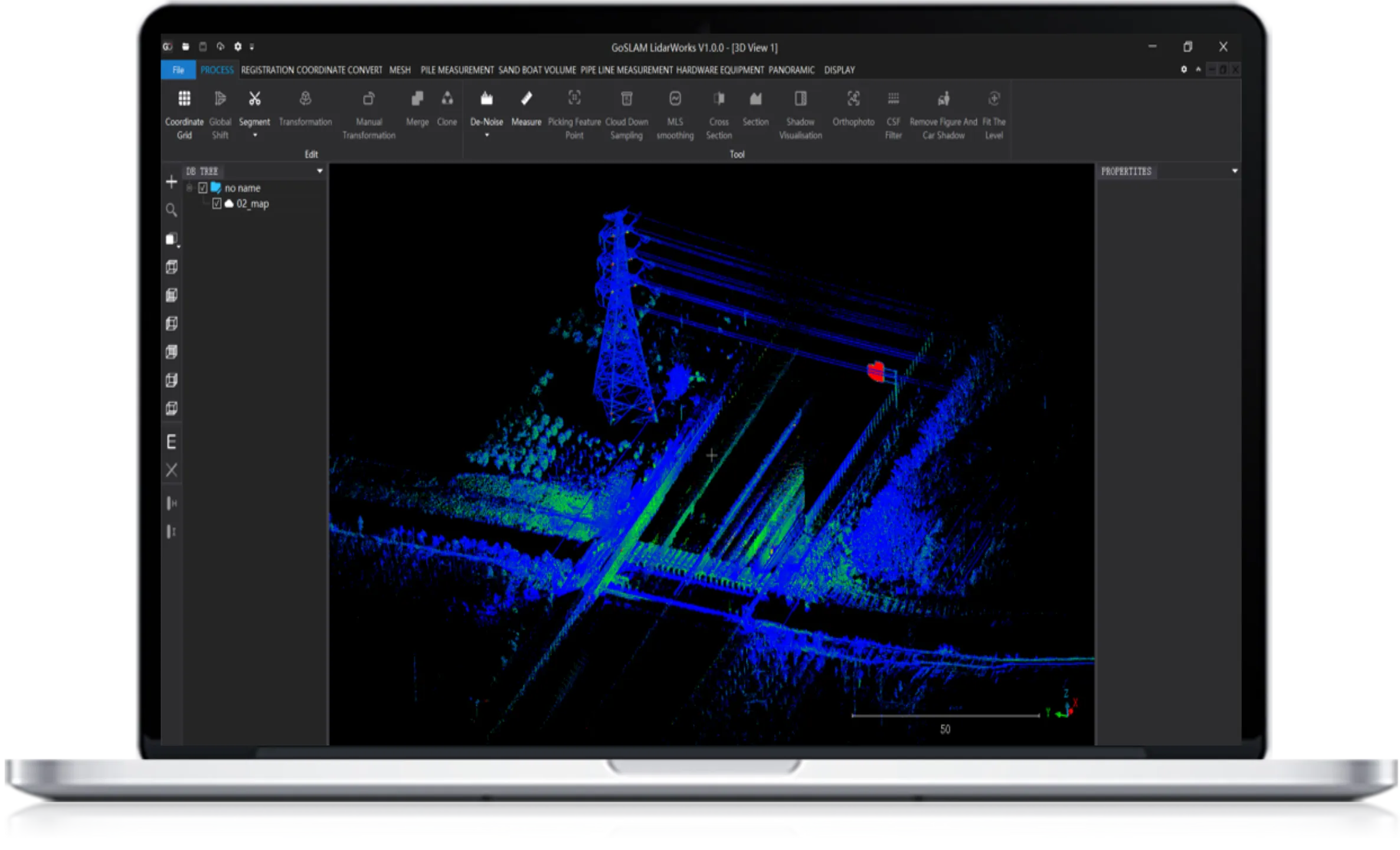
GoSLAM软件
如果没有良好的后处理软件,任何 3D 移动扫描系统都是不完整的,GoSLAM RS 系列也不例外。 GoSLAM LidarWorks是一款完整、功能齐全的桌面软件应用程序,用于导入、处理分析和导出 GoSLAM 扫描仪和相机捕获的 3D 数据。